[ROS2 Q&A] 233 - How to install and use slam_toolbox The Construct 20:09 2 years ago 5 833 Скачать Далее
Making robot navigation easy with Nav2 and ROS! Articulated Robotics 22:39 1 year ago 87 556 Скачать Далее
Nav2 Mapping with SLAM Toolbox | ROS2 Developers Open Class #137 The Construct 1:28:38 2 years ago 18 100 Скачать Далее
2D / 3D Dual SLAM Robot using ROS and LiDAR with Raspberry Pi cygbot lab 1:02 3 years ago 86 630 Скачать Далее
Nav 2 in ROS 2 for autonomous Navigation using SLAM for Indoor Mobile Robots Muhammad Luqman 29:26 1 year ago 18 448 Скачать Далее
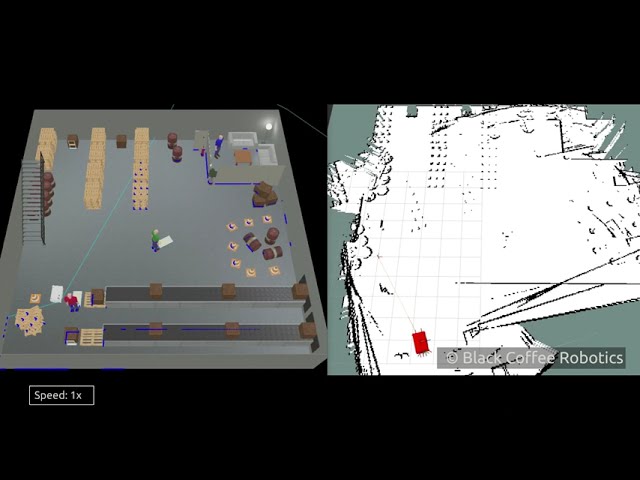
Webots and ROS: SLAM Toolbox with MIR 100 - Slow movement Black Coffee Robotics 0:43 1 year ago 690 Скачать Далее
Webots and ROS: SLAM with MIR 100 - Regular movement Black Coffee Robotics 0:19 1 year ago 649 Скачать Далее
RPLidar and Hector SLAM for Beginners | ROS Tutorial #8 Tiziano Fiorenzani 9:41 5 years ago 154 489 Скачать Далее
Localization, Mapping & SLAM Using gmapping Package | ROS Tutorials for Beginners | Lesson 7 Mecharithm - Robotics and Mechatronics 1:01:59 2 years ago 20 239 Скачать Далее